樹莓派 RPi.GPIO 使用說明
學習樹莓派的第一個模組就是 RPi.GPIO ,什麼是 GPIO ? GPIO(General Purpose I/O Ports)意思是通用輸入/輸出埠,也就是一些針腳可以通過它們輸出高電位或者低電位,可以供使用者由程式控制自由使用,與裝置進行通訊,達到控制裝置的目的。既然一個針腳可以用於輸入、輸出或其他特殊功能,那麼一定有暫存器用來選擇這些功能。對於輸入,一定可以透過讀取某個暫存器來確定針腳電位的高低;對於輸出,一定可以透過寫入某個暫存器來讓這個針腳輸出高電位或者低電位;對於其他特殊功能,則有另外的暫存器來控制它們,所以掌握了 GPIO 就相當於掌握了硬體的控制。
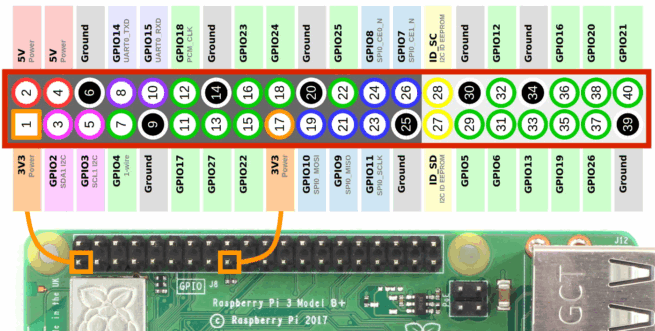
上圖有 40 根針腳,這就是樹莓派控制外部傳感器的接口,稱之為 GPIO(General Purpose I/O Port)。這裡可以看到有二種編號規則,分別是紅框內的 BOARD 編號規則,與紅框外的 BCM 編號規則,接下來我們就來試試 RPi.GPIO 的用法吧。
前置準備
教具準備
| 名稱 | 數量 | 規格 | 備註 |
|---|---|---|---|
| 樹莓派 | 1 | Raspberry Pi 4 Model B (4G) | 就只是現在頂規是這個版本,用三代的也可以 |
| 麵包板 | 1 | 不限 | 測試時容易連結 |
| 杜邦線 | 1 | 不限 | 保證沒有斷芯就好 |
| LED燈 | 2 | 不限 | 測試此設備能發光閃爍 |
| 電阻 | 2 | 10K | 為了不讓 LED 燒掉 |
檢查 wiringPi 版本與升級
由於樹莓派因版本不同,其各針腳的定義也會有些許的差異,那是否能在樹莓派裡就得知呢? 可以的,但你可能跟筆者一樣遇到 Pi 4B 版需要升級的情況,首先檢查一下版本。
$ gpio -v
回傳結果如下,是 2.50 版。
pi@raspberrypi:~ $ gpio -v
gpio version: 2.50
Copyright (c) 2012-2018 Gordon Henderson
This is free software with ABSOLUTELY NO WARRANTY.
For details type: gpio -warranty
Raspberry Pi Details:
Type: Unknown17, Revision: 02, Memory: 0MB, Maker: Sony
* Device tree is enabled.
*--> Raspberry Pi 4 Model B Rev 1.2
* This Raspberry Pi supports user-level GPIO access.
查看各針腳編號的命令如下:
$ gpio readall
回傳結果如下
pi@raspberrypi:~ $ gpio readall
Oops - unable to determine board type... model: 17
這個問題是 wiringPi 模組版本的問題,所以如果你也跟筆者一樣是 Pi 4B版且 wiringPi 版本是 2.50 版,那麼就跟著筆者按照官網指引升級即可,命令如下:
cd /tmp
wget https://project-downloads.drogon.net/wiringpi-latest.deb
sudo dpkg -i wiringpi-latest.deb
更新好後,再來檢查一次版本
$ gpio -v
這時候看到版本已更新到 2.52 了。
pi@raspberrypi:/tmp $ gpio -v
gpio version: 2.52
Copyright (c) 2012-2018 Gordon Henderson
This is free software with ABSOLUTELY NO WARRANTY.
For details type: gpio -warranty
Raspberry Pi Details:
Type: Pi 4B, Revision: 02, Memory: 4096MB, Maker: Sony
* Device tree is enabled.
*--> Raspberry Pi 4 Model B Rev 1.2
* This Raspberry Pi supports user-level GPIO access.
看看 Pi 4B 版的各腳位對應吧。
$ gpio readall
這時回傳的結果已可以看到 Pi 4B 版的各腳位編號了
pi@raspberrypi:/tmp $ gpio readall
+-----+-----+---------+------+---+---Pi 4B--+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| | | 3.3v | | | 1 || 2 | | | 5v | | |
| 2 | 8 | SDA.1 | ALT0 | 1 | 3 || 4 | | | 5v | | |
| 3 | 9 | SCL.1 | ALT0 | 1 | 5 || 6 | | | 0v | | |
| 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 1 | ALT5 | TxD | 15 | 14 |
| | | 0v | | | 9 || 10 | 1 | ALT5 | RxD | 16 | 15 |
| 17 | 0 | GPIO. 0 | IN | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 |
| 27 | 2 | GPIO. 2 | IN | 0 | 13 || 14 | | | 0v | | |
| 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 |
| | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 |
| 10 | 12 | MOSI | ALT0 | 0 | 19 || 20 | | | 0v | | |
| 9 | 13 | MISO | ALT0 | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 |
| 11 | 14 | SCLK | ALT0 | 0 | 23 || 24 | 1 | OUT | CE0 | 10 | 8 |
| | | 0v | | | 25 || 26 | 1 | OUT | CE1 | 11 | 7 |
| 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 |
| 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | |
| 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 |
| 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | |
| 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 |
| 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 |
| | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+---Pi 4B--+---+------+---------+-----+-----+
安裝 RPi.GPIO
不管用什麼方式,請在樹莓派的 Python 虛擬環境安裝 RPi.GPIO 模組,上述前置準備可以學習到怎麼連到此環境,安裝命令可以參考官方 RPI.GPIO 連結,命令如下 :
(dsalearning) $ pip install RPi.GPIO
安裝結果如下
(dsalearning) pi@raspberrypi:~/Documents/envs/dsalearning $ pip install RPi.GPIO
Looking in indexes: https://pypi.org/simple, https://www.piwheels.org/simple
Collecting RPi.GPIO
Using cached https://www.piwheels.org/simple/rpi-gpio/RPi.GPIO-0.7.0-cp37-cp37m-linux_armv7l.whl (69 kB)
Installing collected packages: RPi.GPIO
Successfully installed RPi.GPIO-0.7.0
看到 Successfully installed 就來檢查一下虛擬環境已匯入的模組是否有 RPi.GPIO
(dsalearning) $ pip list
檢查結果
(dsalearning) pi@raspberrypi:~/Documents/envs/dsalearning $ pip list
Package Version
---------- -------
pip 20.0.2
RPi.GPIO 0.7.0
setuptools 46.1.3
wheel 0.34.2
嗯,確定是已安裝進來了,可以放心的使用嘍~
RPi.GPIO方法與屬性
匯入模組
一起來了解 RPi.GPIO1 這個模組的各個方法。匯入模組的指令如下:
import RPi.GPIO as GPIO
BOARD與BCM編號規則屬性
如上文針腳圖有紅框內的 BOARD 編號;與紅框外的 BCM 編號規則,此編號規則會因樹莓派版本而有些不同,所以使用時請務必留意。
打印出 BCM 編號規則屬性值
print(GPIO.BCM)
BCM 回傳結果如下
11
打印出 BOARD 編號規則屬性值
print(GPIO.BOARD)
BOARD 回傳結果如下
10
setmode()
上述知道編號規則屬性值各是多少了,但記數值不直覺,所以還是用屬性名稱吧!
設定 BCM 編號規則的程式如下
GPIO.setmode(GPIO.BCM)
設定 BOARD 編號規則的程式如下
GPIO.setmode(GPIO.BOARD)
getmode()
這個是取得被設置的編號規則屬性值
mode = GPIO.getmode()
回傳的值如下 :
- 未設定: None
- BCM: 11
- BOARD: 10
範例
查看未設定編號規則時是取得 None ,再設定指定的編號規則後,取得設定的屬性值。
import RPi.GPIO as GPIO
print(GPIO.getmode())
print(GPIO.BCM)
print(GPIO.BOARD)
GPIO.setmode(GPIO.BCM)
mode = GPIO.getmode()
print(mode)
回傳結果
None
11
10
11
setup()
在你要使用的針腳時,必須先設定這個針腳是作為輸出還是輸入。
語法
GPIO.setup({channel | chan_list}, {GPIO.OUT | GPIO.IN}, [initial= {GPIO.HIGH | GPIO.LOW}])
引數
channel 是指針腳的編號,依據設定的針腳編號規則的編號,例如
channel = 25 #BCM編號規則
chan_list 也可以一次設定多個針腳,例如
chan_list = [11,12]
GPIO.OUT 將指定的針腳作為輸出,如果想讓 LED 燈亮或驅動某個設備,就需要給它們電流和電壓,只要將針腳設定為輸出即可,範例如下
GPIO.setup(25, GPIO.OUT)
若去 print() 該屬性則會得到值為 0 ,相當於是 boolean 值的 False,所以也可以用 False 填入,但為了讓程式的可讀性好,請還是使用屬性名稱的方式。
print(GPIO.OUT)
print(type(GPIO.OUT))
回傳結果如下
0
<class 'int'>
GPIO.IN 想要獲取針腳的狀態就將針腳設定為輸入,筆者認為這些傳感器輸出訊號,在樹莓派要接收就設為輸入。設定都跟上面的 GPIO.OUT 語法一樣。
initial 為針腳設定預設值,例如下方範例為設定輸出的針腳同時給予高電位。
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH)
相當於下面語法
GPIO.setup(channel, GPIO.OUT)
GPIO.output(channel,GPIO.HIGH)
output()
前面的範例已使用到 output() ,意思就是設定針對輸出的狀態是高電位還是低電位,這樣就可以讓 LED 燈亮或熄滅,或者驅動或停止驅動裝置。
GPIO.output(channel,GPIO.HIGH)
input()
當針腳已被設定高低電位時,可以用此函式取得該針腳的當下狀態為何,這樣就可以進一步有邏輯去判斷了。
if GPIO.input(channel):
print('HIGH')
else:
print('LOW')
cleanup()
好的程序猿就要懂得釋放資源,這樣才不會成為技術債或損壞樹莓派,釋放的命令如下:
GPIO.cleanup()
注意! GPIO.cleanup()只會清理執行腳本裡使用過的 GPIO 腳位,也會清除正在使用的編號規則。
setwarnings()
當檢測到某個針腳己經被設置為非預設值時,你會得到一個警告。如果要停用這個警告,就使用這個函式即可停止。
GPIO.setwarnings(False)
例如筆者的第一個範例 LED閃爍,第一次執行時並沒有警告出現,當再按一次執行時,就會出現如下的警告:
blink.py:7: RuntimeWarning: This channel is already in use, continuing anyway. Use GPIO.setwarnings(False) to disable warnings.
GPIO.setup(25,GPIO.OUT,initial=GPIO.LOW)
wait_for_edge()
待寫
event_detected()
待寫
範例
A. 使用 chan_list
設定針腳 24,25 (BCM編號) 為輸出,同時設定這二個針腳為輸出,本範例是將 2 個 LED 一開始都亮 3 秒後輪流亮 1 秒。
#實作 : 2個LED都亮3秒後輪流亮1秒
import RPi.GPIO as GPIO
import time
chan_list = [24,25]
GPIO.setmode(GPIO.BCM)
GPIO.setup(chan_list,GPIO.OUT)
GPIO.output(chan_list, GPIO.HIGH) #全部燈亮
time.sleep(3)
while True:
GPIO.output(chan_list, (GPIO.HIGH, GPIO.LOW)) #24 亮; 25 暗
time.sleep(1))
GPIO.output(chan_list, (GPIO.LOW, GPIO.HIGH)) #24 暗; 25 亮
time.sleep(1)
留言